Dynamic Swarm Navigation
Multi-Agent RL for Dynamic Swarm Navigation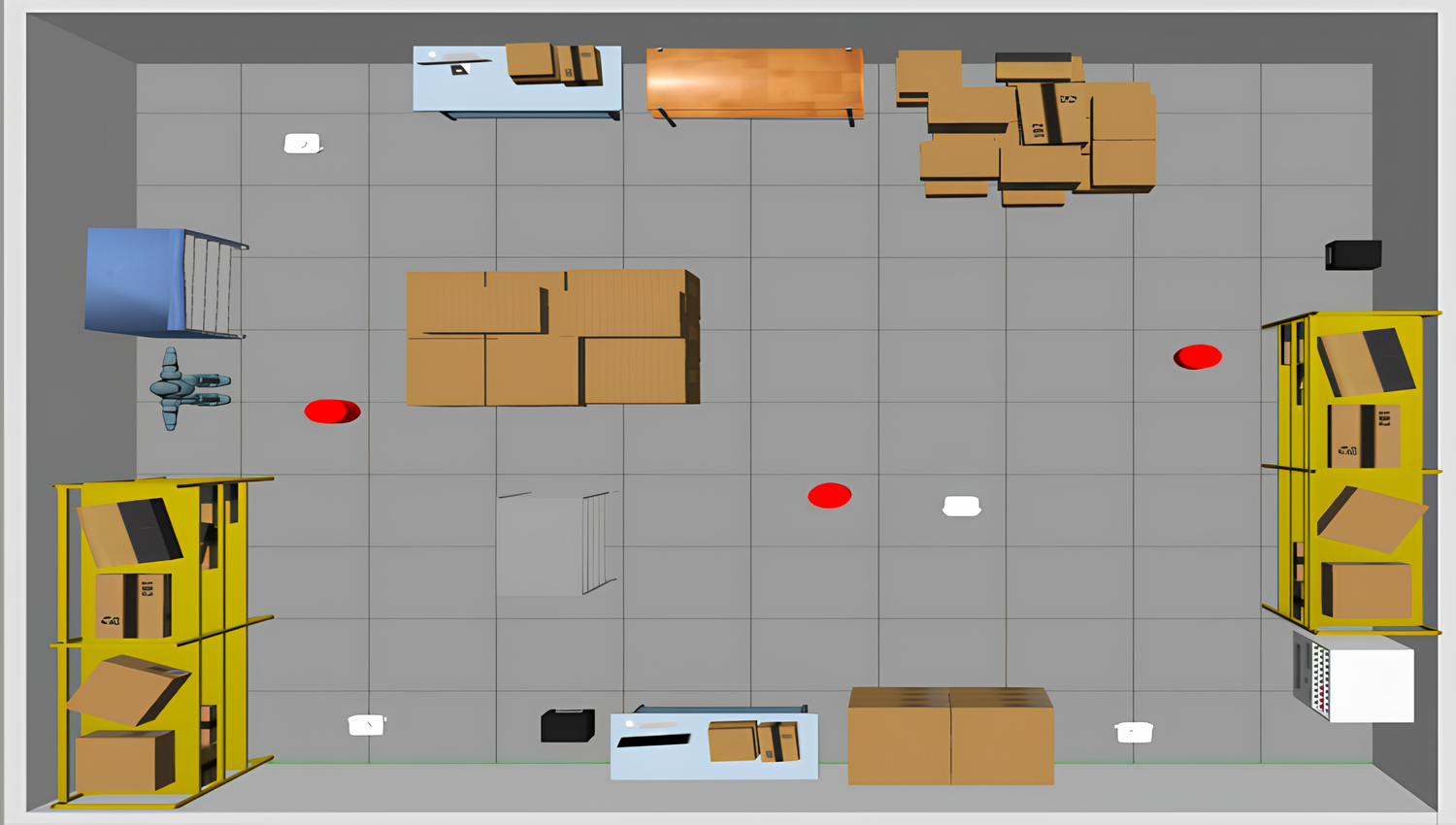
Multi-Agent RL for Dynamic Swarm Navigation
Modulated Dynamical Systems for Coordinated Bimanual Manipulation 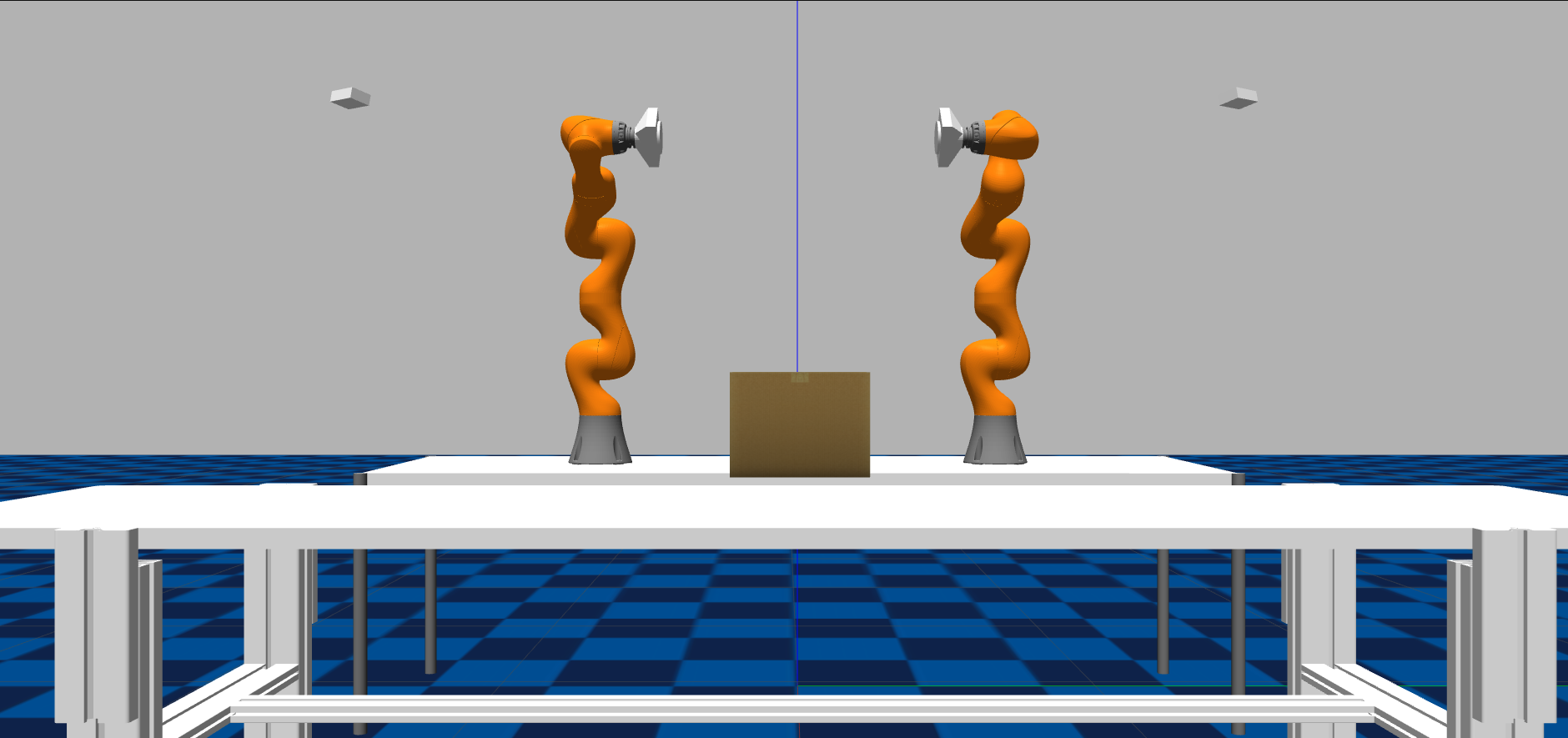
Sub-optimality and Diversity challenges in Offline RL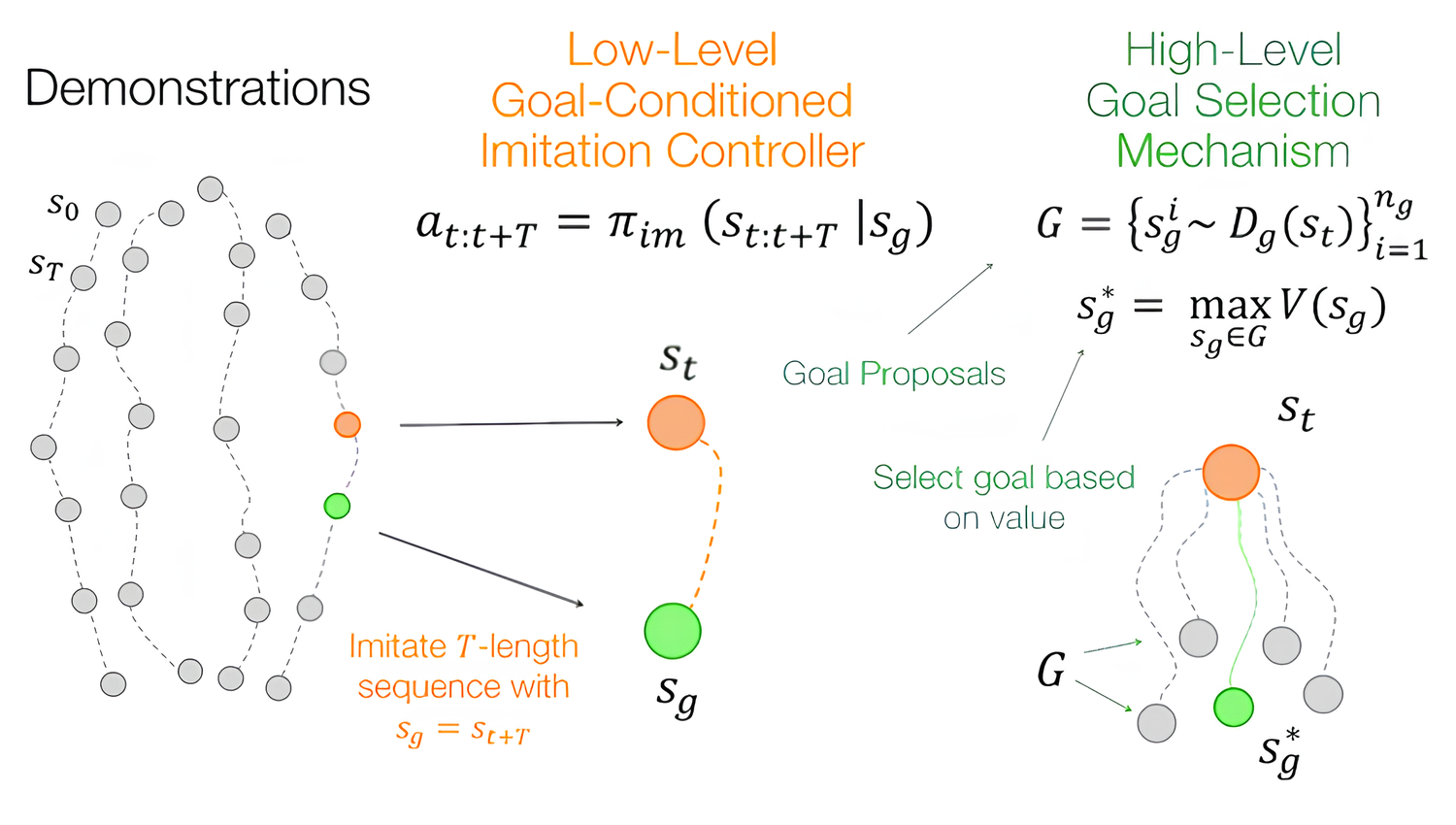
Deep Neural Networks for Denoising MVTEC AD Dataset by KLA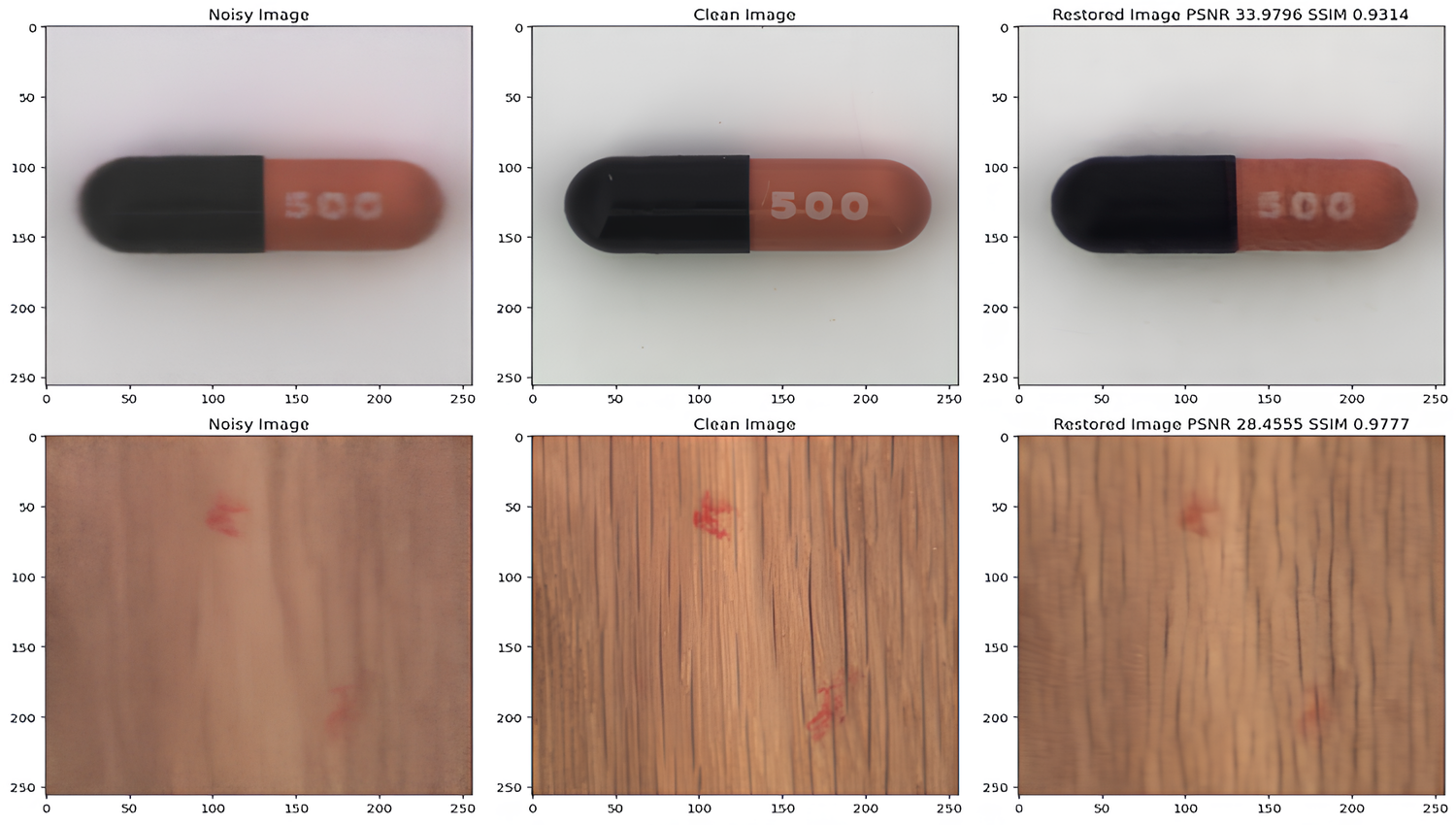
Optimal Motion Planning for Mobile Manipulator System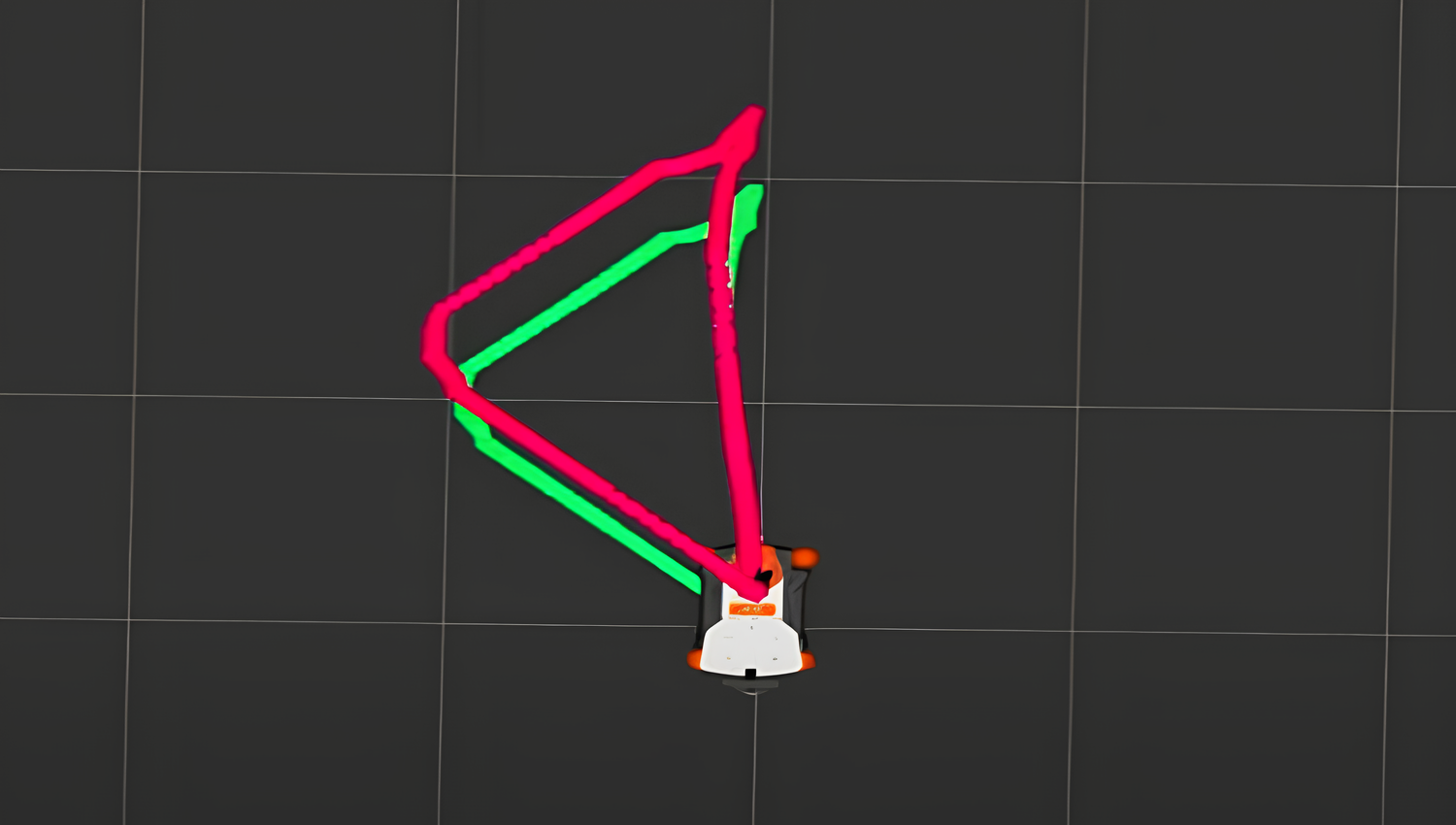
A Comprehensive Study on various Grasping Algorithms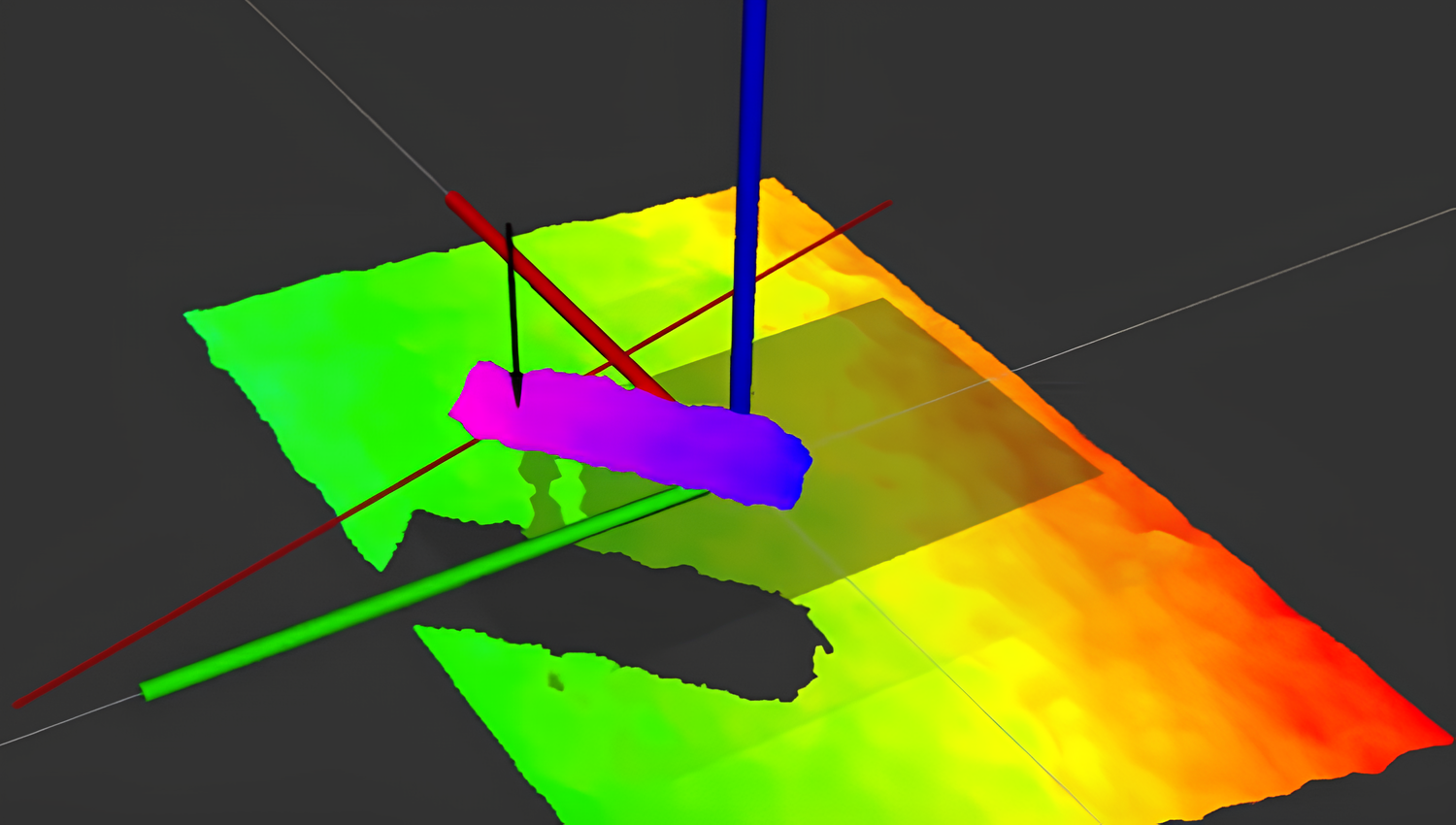
Autonomous Ground Vehicle (AGV) for navigating a greenhouse to pluck targeted yield